Simulation Interface Components
Fig. 30 is an extension of
Fig. 28 that adds details of
the components that make up each of the simulation interfaces (system
call, fork, and direct). These components include an input_filter
(“IFilter”), one or more analysis_drivers (“Analysis Code/Driver”),
and an output_filter (“OFilter”). The input and output filters
provide optional facilities for managing simulation pre- and
post-processing, respectively. More specifically, the input filter can
be used to insert the Dakota parameters into the input files required by
the simulator program, and the output filter can be used to recover the
raw data from the simulation results and compute the desired response
data set. If there is a single analysis code, it is often convenient to
combine these pre- and post-processing functions into a single
simulation driver script, and the separate input and output filter
facilities are rarely used in this case. If there are multiple analysis
drivers, however, the input and output filter facilities provide a
convenient means for managing non-repeated portions of the pre- and
post-processing for multiple analyses. That is, pre- and post-processing
tasks that must be performed for each analysis can be performed within
the individual analysis drivers, and shared pre- and post-processing
tasks that are only performed once for the set of analyses can be
performed within the input and output filters.
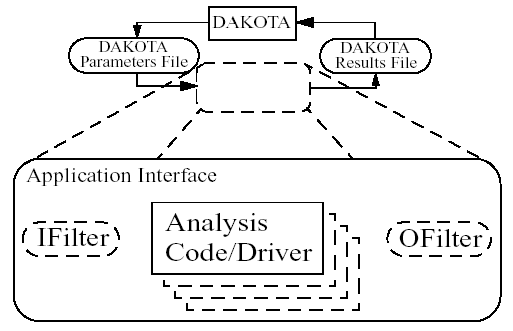
Fig. 30 Components of the simulation interface
When spawning function evaluations using system calls or forks, Dakota
must communicate parameter and response data with the analysis drivers
and filters through use of the file system. This is accomplished by
passing the names of the parameters and results files on the command
line when executing an analysis driver or filter. The input filter or
analysis driver read data from the parameters file and the output filter
or analysis driver write the appropriate data to the responses file.
While not essential when the file names are fixed, the file names must
be retrieved from the command line when Dakota is changing the file
names from one function evaluation to the next (i.e., using temporary
files or root names tagged with numerical identifiers). In the case of a
UNIX C-shell script, the two command line arguments are retrieved using
$argv[1] and $argv[2] (see [AA86]).
Similarly, Bourne shell scripts retrieve the two command line arguments
using $1 and $2, and Perl scripts retrieve the two command line
arguments using @ARGV[0] and @ARGV[1]. In the case of a C or C++
program, command line arguments are retrieved using argc (argument
count) and argv (argument vector) [KR88], and for
Fortran 77, the iargc function returns the argument count and the
getarg subroutine returns command line arguments.
Single analysis driver without filters
If a single analysis_driver is selected in the interface
specification and filters are not needed (as indicated by omission of
the input_filter and output_filter specifications), then only
one process will appear in the execution syntax of the simulation
interface. An example of this syntax in the system call case is:
driver params.in results.out
where driver is the user-specified analysis driver and params.in and results.out are the names of the
parameters and results files, respectively, passed on the command line.
In this case, the user need not retrieve the command line arguments
since the same file names will be used each time.
For the same mapping, the fork simulation interface echoes the following syntax:
blocking fork: driver params.in results.out
for which only a single blocking fork is needed to perform the evaluation.
Executing the same mapping with the direct simulation interface results in an echo of the following syntax:
Direct function: invoking driver
where this analysis driver must be linked as a function within Dakota’s direct interface (see the “Developing a Direct Simulation Interface” section). Note that no parameter or response files are involved, since such values are passed directly through the function argument lists.
Both the system call and fork interfaces support asynchronous operations. The asynchronous system call execution syntax involves executing the system call in the background:
driver params.in.1 results.out.1 &
and the asynchronous fork execution syntax involves use of a nonblocking fork:
nonblocking fork: driver params.in.1 results.out.1
where file tagging) has been user-specified in both cases to prevent conflicts between concurrent analysis drivers. In these cases, the user must retrieve the command line arguments since the file names change on each evaluation.
Note
Execution of the direct interface must currently be performed synchronously since multithreading is not yet supported. See the section on direct function synchronization for more information.
Single analysis driver with filters
When filters are used, the syntax of the system call that Dakota performs is:
ifilter params.in results.out; driver params.in results.out;
ofilter params.in results.out
in which the input filter (ifilter), analysis driver (driver), and output filter (ofilter)
processes are combined into a single system call through the use of
semi-colons (see [AA86]). All three portions are
passed the names of the parameters and results files on the command
line.
For the same mapping, the fork simulation interface echoes the following syntax:
blocking fork: ifilter params.in results.out;
driver params.in results.out; ofilter params.in results.out
where a series of three blocking forks is used to perform the evaluation.
Executing the same mapping with the direct simulation interface results in an echo of the following syntax:
Direct function: invoking { ifilter driver ofilter }
where each of the three components must be linked as a function within Dakota’s direct interface. Since asynchronous operations are not yet supported, execution simply involves invocation of each of the three linked functions in succession. Again, no files are involved since parameter and response data are passed directly through the function argument lists.
Asynchronous executions would appear as follows for the system call interface:
(ifilter params.in.1 results.out.1; driver params.in.1 results.out.1;
ofilter params.in.1 results.out.1) &
and, for the fork interface, as:
nonblocking fork: ifilter params.in.1 results.out.1;
driver params.in.1 results.out.1; ofilter params.in.1 results.out.1
where file tagging of evaluations has again been user-specified in both cases. For the system call simulation interface, use of parentheses and semi-colons to bind the three processes into a single system call simplifies asynchronous process management compared to an approach using separate system calls. The fork simulation interface, on the other hand, does not rely on parentheses and accomplishes asynchronous operations by first forking an intermediate process. This intermediate process is then reforked for the execution of the input filter, analysis driver, and output filter. The intermediate process can be blocking or nonblocking (nonblocking in this case), and the second level of forks can be blocking or nonblocking (blocking in this case). The fact that forks can be reforked multiple times using either blocking or nonblocking approaches provides the enhanced flexibility to support a variety of local parallelism approaches.
Multiple analysis drivers without filters
If a list of analysis_drivers is specified and filters are not
needed (i.e., neither input_filter nor output_filter appears),
then the system call syntax would appear as:
driver1 params.in results.out.1; driver2 params.in results.out.2;
driver3 params.in results.out.3
where driver1, driver2, and driver3 are the user-specified analysis
drivers and params.in and results.out are the
user-selected names of the parameters and results files. Note that the
results files for the different analysis drivers have been automatically
tagged to prevent overwriting. This automatic tagging of analyses
is a separate operation from user-selected tagging of evaluations.
For the same mapping, the fork simulation interface echoes the following syntax:
blocking fork: driver1 params.in results.out.1;
driver2 params.in results.out.2; driver3 params.in results.out.3
for which a series of three blocking forks is needed (no reforking of an intermediate process is required).
Executing the same mapping with the direct simulation interface results in an echo of the following syntax:
Direct function: invoking { driver1 driver2 driver3 }
where, again, each of these components must be linked within Dakota’s direct interface and no files are involved for parameter and response data transfer.
Both the system call and fork interfaces support asynchronous function evaluations. The asynchronous system call execution syntax would be reported as
(driver1 params.in.1 results.out.1.1; driver2 params.in.1 results.out.1.2;
driver3 params.in.1 results.out.1.3) &
and the nonblocking fork execution syntax would be reported as
nonblocking fork: driver1 params.in.1 results.out.1.1;
driver2 params.in.1 results.out.1.2; driver3 params.in.1 results.out.1.3
where, in both cases, file tagging of evaluations has been user-specified to prevent conflicts between concurrent analysis drivers and file tagging of the results files for multiple analyses is automatically used. In the fork interface case, an intermediate process is forked to allow a non-blocking function evaluation, and this intermediate process is then reforked for the execution of each of the analysis drivers.
Multiple analysis drivers with filters
Finally, when combining filters with multiple analysis_drivers, the
syntax of the system call that Dakota performs is:
ifilter params.in.1 results.out.1;
driver1 params.in.1 results.out.1.1;
driver2 params.in.1 results.out.1.2;
driver3 params.in.1 results.out.1.3;
ofilter params.in.1 results.out.1
in which all processes have again been combined into a single system call through the use of semi-colons and parentheses. Note that the secondary file tagging for the results files is only used for the analysis drivers and not for the filters. This is consistent with the filters’ defined purpose of managing the non-repeated portions of analysis pre- and post-processing (e.g., overlay of response results from individual analyses).
For the same mapping, the fork simulation interface echoes the following syntax:
blocking fork: ifilter params.in.1 results.out.1;
driver1 params.in.1 results.out.1.1;
driver2 params.in.1 results.out.1.2;
driver3 params.in.1 results.out.1.3;
ofilter params.in.1 results.out.1
for which a series of five blocking forks is used (no reforking of an intermediate process is required).
Executing the same mapping with the direct simulation interface results in an echo of the following syntax:
Direct function: invoking { ifilter driver1 driver2 driver3 ofilter }
where each of these components must be linked as a function within Dakota’s direct interface. Since asynchronous operations are not supported, execution simply involves invocation of each of the five linked functions in succession. Again, no files are involved for parameter and response data transfer since this data is passed directly through the function argument lists.
Asynchronous executions would appear as follows for the system call interface:
(ifilter params.in.1 results.out.1;
driver1 params.in.1 results.out.1.1;
driver2 params.in.1 results.out.1.2;
driver3 params.in.1 results.out.1.3;
ofilter params.in.1 results.out.1) &
and for the fork interface:
nonblocking fork: ifilter params.in.1 results.out.1;
driver1 params.in.1 results.out.1.1;
driver2 params.in.1 results.out.1.2;
driver3 params.in.1 results.out.1.3;
ofilter params.in.1 results.out.1
where, again, user-selected file tagging of evaluations is combined with automatic file tagging of analyses. In the fork interface case, an intermediate process is forked to allow a non-blocking function evaluation, and this intermediate process is then reforked for the execution of the input filter, each of the analysis drivers, and the output filter.
A complete example of these filters and multi-part drivers can be found
in dakota/share/dakota/test/dakota_3pc/dakota_3pc.in.